
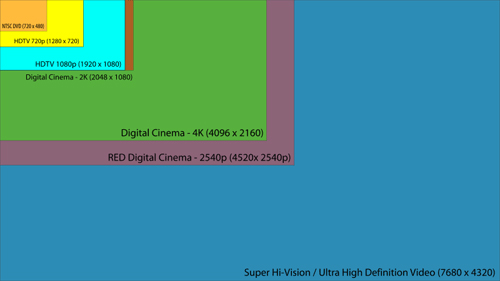
Если вы окажетесь в Лондоне во время проведения Олимпийских игр 2012 без билета, у вас будет альтернативная возможность «посетить» некоторые спортивные события. BBC планирует транслировать часть соревнований в формате Ultra High HD (UHD). Видеоформат UHD, несколько лет разрабатываемый японской государственной телекомпанией NHK, предоставляет изображение 8K4K (7680x4320 пикселей). Скорее всего, этот видеоформат будет представлен на рынке лет через 5. Сегодня есть насущная потребность в промежуточном варианте - разрешении 4K2K.
Для многих специалистов в области вещания это разрешение станет сюрпризом далеко не долгожданным. Но люди, работающие в киноиндустрии, с ним уже знакомы. Сегодня пленку обычно переводят в 4K2K файлы для цифрового промежуточного процессинга (digital intermediate processing), а художественные фильмы снимаются на 4K2K камеры.
В этой статье мы познакомим читателя с данным разрешением, анализируя некоторые существующие модели 4K2K камер. Проводя это исследование, мы коснемся многих проблем, связанных с этой технологией.
За пределами количества пикселей
Всего лишь 10 лет назад 2-х мегапиксельные CCD были еще экзотикой. Теперь в большинстве камкордеров используются сенсоры CMOS, а 8-мегапиксельные сенсоры стали столь привычным явлением, что многие из них уже используются в смартфонах.
Сегодня производители как full HD, так и 4K2K видеокамер сталкиваются с проблемами, не имеющими никакого отношения к количеству пикселей. Во-первых, как информация считывается со CMOS- сенсора? Чем больше количество светочувствительных элементов сенсора, чем выше частота кадров и больше их размер, тем сложнее процесс считывания. Если не решить эту проблему, синхронизирующая частота сенсора настолько повысится, что энергия, которую он потребляет, будет давать больше тепла, чем может рассеяться. Это приведет к ограничению времени съемки, особенно при высокой температуре окружающей среды.
Вторая проблема заключается в том, что многие камеры full HD и большинство камер 4K2K имеют только один сенсор, и поэтому используют фильтр Bayer RGB. Чтобы получить RGB-изображение данные такого сенсора должны пройти через процесс дебаеринга. Конструкторы камер стоят перед выбором: создать устройство, которое предоставляет RGB- разрешение равное, либо же меньшее, чем у трехчиповой камеры.
И, в-третьих, предназначена ли камера для съемки кино или видео? Во втором случае сенсор будет большим: Super 35 (23.60мм x 13.25мм), APS-C (23.6мм x 15.7мм), или Micro Four Thirds (M43) (21.6мм x 17.3мм) специально для получения небольшой глубины резкости. Однако оператору может потребоваться только высокое разрешение камеры 4K2K. Тогда можно воспользоваться небольшим чипом 1/2” (6.4мм x 4.8мм) или чипом 1/2.3” (6.16мм x 4.92мм).
Скоро появятся пользовательские модели 4K2K, скорее всего, с небольшими чипами. Камеры 4K2K для пользователей профессионального уровня будут с небольшими чипами M43, APS-C или Super 35. Использование сенсоров M43 и APS оправдано, так как развитие DSLR привело к появлению многих современных односенсорных камер full HD и камкордеров. Такая преемственность технологий будет продолжаться для камер 4K2K.
RED ONE
Red Digital Cinema RED ONE это 4K2K камера, самая распространенная в области вещания. Оборудованная новейшим сенсором MYSTERIUM-X, камера RED ONE имеет 14-мегапиксельный Super 35 чип CMOS со светочувствительным элементом, размеры которого 5120 x 2700. Сенсор может обрабатывать потоки методом окна во время вывода, предоставляя четыре формата кадра 4K2K.
Самый большой формат кадра 4K2K называется “4K 16:9” - 4096 x 2304 пикселей. Второй формат кадра, который называют “4K 2:1” и “4K анаморфный 2:1” - 4096 x 2048. Третий формат кадра называется “4K HD”- 3840 x 2160 пикселей и может использоваться как в HD, так и 4K2K видеопроизводстве (вероятнее всего, профессионалы, пользователи продвинутого уровня и простые пользователи 4K2K камер будут использовать кадр 3840 x 2160, а проекторы и мониторы, наверное, будут поддерживать как 3840 x 2160, так и 4096 x 2160 формат).
Камера RED ONE может снимать при широком диапазоне частот кадров. Однако нужно найти компромисс между частотой кадров и их форматом. Для того чтобы снимать при высокой частоте, ширину линии считывания необходимо установить на отметке “3K” или “2K” пикселей.
Как только камера RED ONE захватывает кадр, он считывается, как последовательные RGB-данные. Затем эти данные разделяются на 2 потока. Исходные сенсорные данные (RAW data) подвергаются Wavelet- трансформации (с помощью 12-битного кодека REDCODE RAW codec) и выводятся для записи. Второй поток данных передается через второй вывод на местный монитор. При просмотре изображения оператор может настраивать его параметры по своему усмотрению. Эти настройки не изменят поток, который записывается. Наоборот, они становятся метаданными, которые записываются с данными изображений. На этапе пост-продакшн специалист по цветокоррекции может использовать как настройки, сделанные на месте съемки, так и вносить собственные изменения.
|
|
|

Для получения RGB-изображения после распаковки данных REDCODE они подвергаются дебайерингу через приложения RED. До этого момента кадры определяются только с точки зрения светочувствительного элемента. Разрешение камеры не может быть измерено. Из-за того, что существует множество алгоритмов дебайеринга, этот процесс является одним из важнейших аспектов работы односенсорных камер (см. «О дебайеринге» в конце статьи).
Камера RED ONE с сенсором 4520 x 2540 MYSTERIUM имеет горизонтальное разрешение, которое насчитывает почти 3100 ТВЛ (1550 пар линий). Это означает, что эффективность дебайеринга составляет приблизительно 78%. Еще одна камера RED EPIC приблизила нас к цели создать разрешение в 4000 ТВЛ. Эта камера отличается сенсором 5K (5120 x 2700), который после дебайеринга должен предоставить около 3874 ТВЛ (1937 пар линий).
Sony F65
Рассмотрим камеру Sony F65 из другого ценового диапазона. Эта модель отличается сенсором CMOS, который, по словам представителей компании, предоставляет «настоящее» 4K- разрешение.
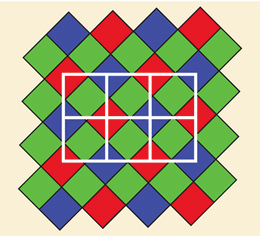
«Настоящий» 4K CMOS сенсор камеры Sony F65
Сенсор с 20 миллионами светочувствительных элементов имеет диагонально ориентированный шаблон Байера и зеленую составляющую в любом пикселе 4K2K RGB изображения. Sony утверждает, что уникальная конструкция чипа предоставляет горизонтальное, вертикальное и даже диагональное разрешение в зеленом канале, а также полностью горизонтальное и вертикальное разрешение в синем и красном каналах.
Несмотря на существенную разницу в цене обе камеры Sony и RED имеют единственный CMOS-сенсор размером Super 35, который может считываться полностью для каждого захвата.
Canon EOS C300
Анонсированная камера Canon EOS C300 также имеет сенсор размером Super 35 со светочувствительным элементом 3840 x 2160 и шаблоном Байера. Сенсор функционирует весьма необычно: два ряда ячеек считываются одновременно. Таким образом, «верхние» и «нижние» светочувствительные пары доступны одновременно. Когда каждая светочувствительная пара из двух рядов объединяется с другой парой, с задержкой на один пиксель за единицу времени, с предыдущего столбца, становятся доступными сигналы с четырех светочувствительных элементов. Каждая светочувствительная группа 2 x 2 (RGBG) объединяется в один RGB-пиксель. Благодаря этому процессу получается кадр размером 1920 x 1080 пикселей, который по определению имеет цветовую дискретизацию 4:4:4. Затем каждый кадр full HD с данными объемом 8 бит сжимается со скоростью 50Мб/с с использованием кодека 4:2:2 long-GOP MPEG-2.
Canon уже анонсировал разработку полнокадровой DSLR- камеры, которая будет иметь 3840 x 2160 сенсор и записывать с разрешением 4K2K.
О дебайеринге
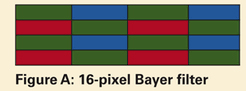 Сенсор с фильтром Байера имеет лишь половину от всего количества зеленых составляющих на ряд и половину зеленых составляющих на столбец, так как фильтр состоит из столбцов и рядов.
Сенсор с фильтром Байера имеет лишь половину от всего количества зеленых составляющих на ряд и половину зеленых составляющих на столбец, так как фильтр состоит из столбцов и рядов.
Например, сенсор, размером 1000 x 1000, может предоставить всего лишь 500 x 500 зеленых составляющих. Одна из функций процесса дебайеринга - воссоздание как можно большего количества зеленой информации. Количество воссозданных зеленых элементов можно назвать «эффективностью» дебайеринга. Опубликованные значения существенно отличаются, но колеблются от 70 до 80% на ось.
Программное обеспечение для дебайеринга может быть скорректировано так, чтобы восстанавливать как можно больше мелких деталей за счет артефактов или предоставлять очень чистое изображение. Разработчики камер могут отдать предпочтение одному из этих свойств. Рабочее значение для высококачественного процесса составляет 78%.
 Поэтому наш воображаемый сенсор должен иметь размер минимум 1282 x 1282 (1.64 мегапикселей), чтобы предоставить возможность с помощью дебайеринга восстановить 1000 x 1000 зеленой информации (1/0.78 x 1000). То есть количество пикселей увеличится в 1.64 раза. Таким образом, односенсорная full HD камера должна иметь 3.4-мегапиксельный сенсор, в то время как 4K2K камера должна иметь 13.6-мегапиксельный сенсор. (Оба сенсора имеют соотношение сторон 16:9).
Поэтому наш воображаемый сенсор должен иметь размер минимум 1282 x 1282 (1.64 мегапикселей), чтобы предоставить возможность с помощью дебайеринга восстановить 1000 x 1000 зеленой информации (1/0.78 x 1000). То есть количество пикселей увеличится в 1.64 раза. Таким образом, односенсорная full HD камера должна иметь 3.4-мегапиксельный сенсор, в то время как 4K2K камера должна иметь 13.6-мегапиксельный сенсор. (Оба сенсора имеют соотношение сторон 16:9).
Последовательные RGB (sRGB) данные подвергаются дебайерингу для создания RGB- изображения, которое по своей сути имеет цветовую дискретизацию 4:2:2. Процесс дебайеринга может распространяться на ближайшие соседние элементы, быть линейным, кубическим, кубически-сплайновым и т. д. Ниже следует упрощенное описание дебайеринга соседних элементов структуры.
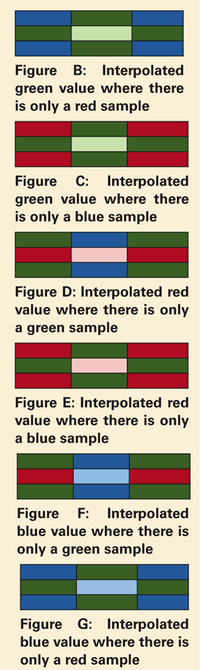
На рисунке В показано интерполированное зеленое значение там, где есть только красный элемент. Перемещаясь по вертикали, можно увидеть прилегающие вертикальные или горизонтальные пары зеленых элементов.
На рисунке C показано интерполированное зеленое значение там, где есть только синий элемент. Перемещаясь по вертикали, можно увидеть прилегающие вертикальные или горизонтальные пары зеленых элементов.
Отсутствующие красные значения приобретаются с помощью их интерполяции из близлежащих красных элементов, которые горизонтально прилегают к зеленому пикселю, который не имеет красного элемента (смотрите рис. D).
Отсутствующие красные значения можно приобрести путем их интерполяции из близлежащих красных элементов, которые диагонально прилегают к синему пикселю, который не имеет красного элемента (смотрите рис. E).
Отсутствующие синие значения приобретаются путем их интерполяции из близлежащих синих элементов, которые вертикально прилегают к зеленому пикселю, в котором отсутствует синий элемент (смотрите рис. F).
Отсутствующие синие значения также можно приобрести путем их интерполяции из близлежащих синих элементов, которые диагонально прилегают к красному пикселю, у которого в свою очередь отсутствует синий элемент (смотрите рис. G).
После дебайеринга кадра с sRGB- данными получается RGB- кадр такого же размера.
Телекритика



Подробнее...